 Article
Article
Software Release: Version 2024.07: 30% schneller - das bahnbrechende Software Release für HORST
Das Speed-Update over the air mit bis zu 30 Prozent schnelleren Taktzeiten für alle HORST-Modelle...

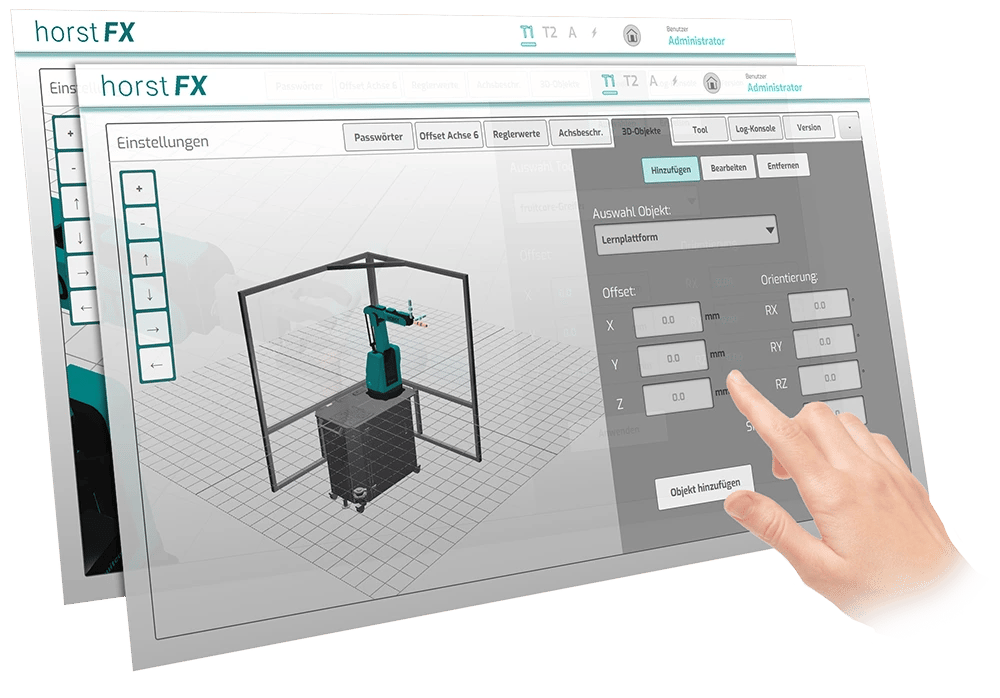
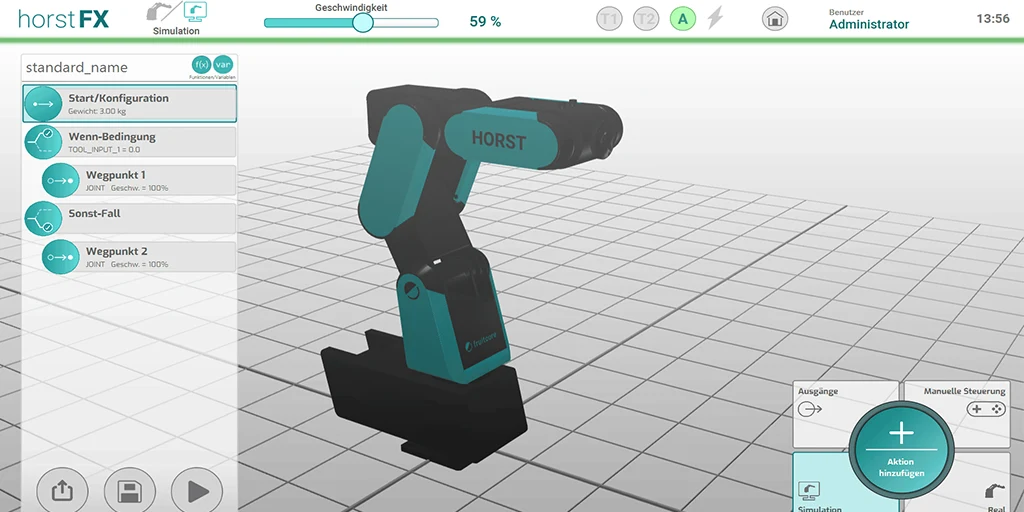
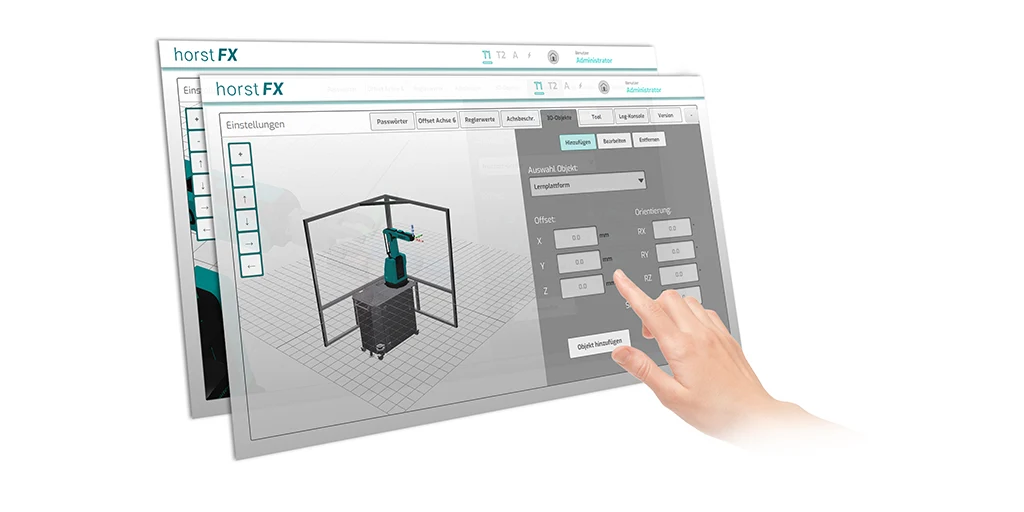
Mit horstFX steht Ihnen eine Roboter-Software zur Verfügung, die Ihresgleichen sucht: Intuitiv und benutzerfreundlich aufgebaut, profitieren von Ihr Einsteiger wie Experten der Industrierobotik gleichermaßen. Erfahren Sie hier mehr über die neuesten Funktionen, Erweiterungen und vorgefertigte Programmabläufe.
 Article
Article
Das Speed-Update over the air mit bis zu 30 Prozent schnelleren Taktzeiten für alle HORST-Modelle...
 Article
Article
Unser neuestes Software-Update präsentiert sich mit einer bedeutenden Leistungssteigerung und...
 Article
Article
Erfahren Sie mehr über neue Funktionen, Features und Erweiterungen in der Version 2023.04 von...
 Article
Article
Erfahren Sie mehr über das Setzen von Makro-Buttons, Erweiterungen der globalen Funktionen und...
 Article
Article
Lesen Sie in diesen Release Notes zum Update 2022.04 für horstFX, wie globale grafische...
Lesen Sie in dieser Zusammenfassung von Release Notes bis zur Version 2022.01, was sich in...