|
Industrial Physical AI Platform
Physical AI für die Produktion
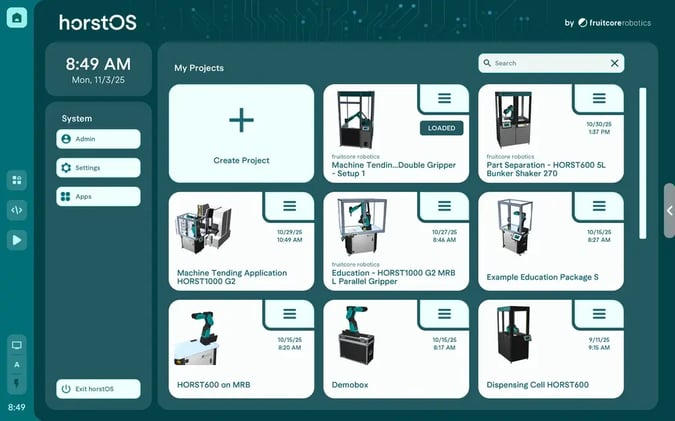
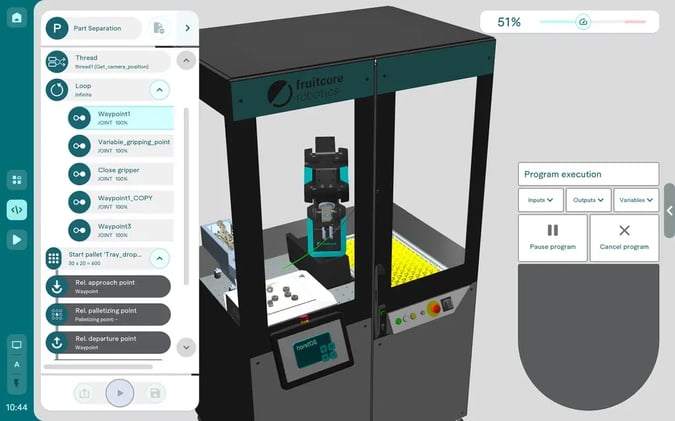
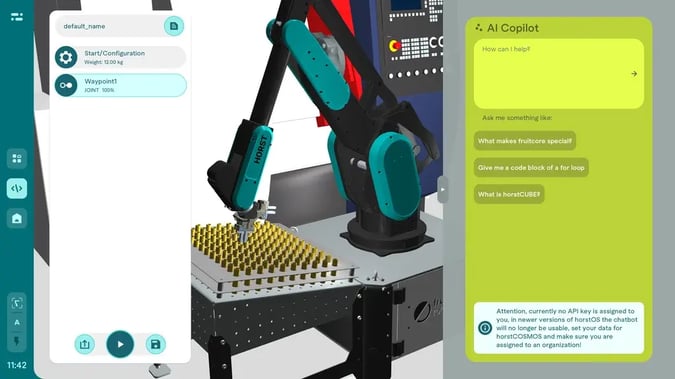
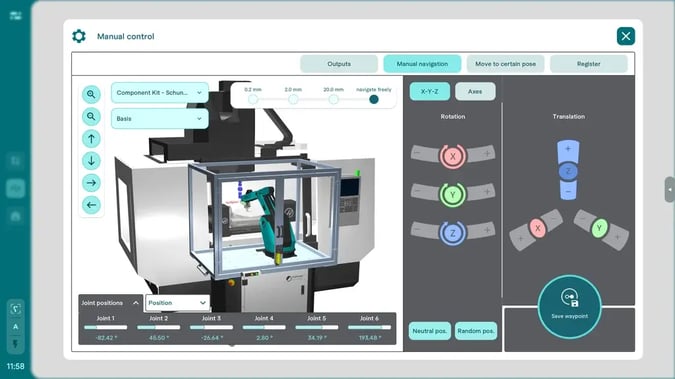
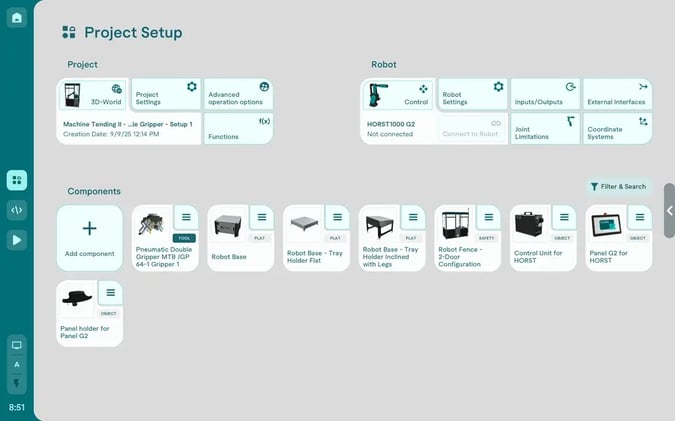
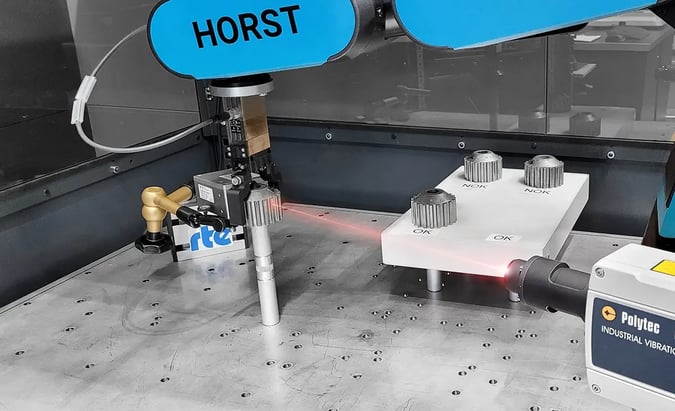
Automatisierung darf nicht länger starr, komplex und schwer zugänglich sein. Unsere Industrial Physical AI Platform verbindet KI-Agenten, intuitive Software und Industrial Humanoids zu einer neuen Generation adaptiver Robotersysteme. Sie unterstützt zentrale Aufgaben in Einrichtung, Programmierung und Optimierung – und macht industrielle Automatisierung einfacher, schneller und wirtschaftlicher einsetzbar.
Was gestern Zukunft war, beginnt jetzt.