Mit unserem Produktfinder passgenau und schnell Ihren HORST entdecken
Wenige Klicks zum perfekten Angebot
Entdecken Sie die ideale Kombination aus Industrieroboter, maßgeschneiderter Software und Services sowie ein ganzheitliches Schulungskonzept.

HORST600

Reichweite
584 mm
Maximale Traglast
3 kg
Wiederholgenauigkeit
±0,05 mm
Max. Geschwindigkeit (TCP)
4,4 m/s
Achsen
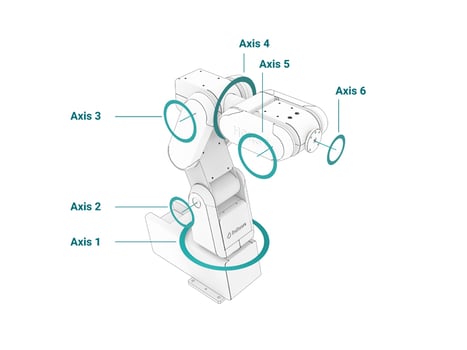
6
Gewicht
30 kg
Umgebungstemperatur
5 - 40 °C
Schallpegel
< 70 dB
Schutzart
IP54
Stromversorgung
230 VAC, 50-60 Hz typ. 250 W
Digitale Eingänge am Werkzeugflansch
2
Digitale Ausgänge am Werkzeugflansch
2
E/A-Stromversorgung am Werkzeugflansch
24 V / 2.5 A
Abmessungen Control (L x B x H)
446 mm x 313 mm x 174 mm
Digitale Eingänge am Schaltschrank
20
E/A-Stromversorgung am Schaltschrank
24 V / 7 A
Sicherheitsrelevante Eingänge (je 2 Kanäle)
6
Verkabelung zwischen Roboter und Steuerung
3 m
Digitale Ausgänge am Schaltschrank
18
Sicherheitsrelevante Ausgänge (je 2 Kanäle)
8
Abmessungen Panel (L x B x H)
330 mm x 255 mm x 95 mm
Spezifikation der Anzeige
13.3" Touchscreen (2560 x 1600px)
Sicherheitsrelevanter Not-Aus
Ja
Verkabelung zwischen Panel und Steuerung
5 m
Sicherheitsrelevanter 3-Punkt-Zustimmtaster
Ja
Grafische Programmierung am Panel

Zugriff auf Lizenzmanagement und Updates (horstCOSMOS)

Zugriff auf Daten-Management für Backups
Zugriff auf mobiles Internet (optional)
Textuelle Roboterprogrammierung mit JavaScript

Manuelle Robotersteuerung über digitalen Zwilling

Erweiterte Sicherheitsfunktionen

Aufzeichnen von Prozessdaten

Lastabhängige Optimierung der Robotergeschwindigkeit an Wegpunkten

Max. Robotergeschwindigkeit, Genauigkeit und Leistung
Einrichten einer Arbeitsraumbegrenzung

Zugriff auf das Online-Service-System
Simulation von Roboteranwendungen auf Bedienpanel

Kommunikation mit Peripherie über TCP/IP
HORST1000 G2

Reichweite
1141 mm
Maximale Traglast
16 kg
Wiederholgenauigkeit
±0,05 mm
Max. Geschwindigkeit (TCP)
4,6 m/s
Achsen
6
Gewicht
105 kg
Umgebungstemperatur
5 - 40 °C
Schallpegel
< 70 dB
Schutzart
IP54
Stromversorgung
230 VAC, 50-60 Hz typ. 350 W
Digitale Eingänge am Werkzeugflansch
2
Digitale Ausgänge am Werkzeugflansch
2
E/A-Stromversorgung am Werkzeugflansch
24 V / 2.5 A
Abmessungen Control (L x B x H)
446 mm x 313 mm x 174 mm
Digitale Eingänge am Schaltschrank
20
E/A-Stromversorgung am Schaltschrank
24 V / 7 A
Sicherheitsrelevante Eingänge (je 2 Kanäle)
6
Verkabelung zwischen Roboter und Steuerung
3 m
Digitale Ausgänge am Schaltschrank
18
Sicherheitsrelevante Ausgänge (je 2 Kanäle)
8
Abmessungen Panel (L x B x H)
330 mm x 255 mm x 95 mm
Spezifikation der Anzeige
13.3" Touchscreen (2560 x 1600px)
Sicherheitsrelevanter Not-Aus
Ja
Verkabelung zwischen Panel und Steuerung
5 m
Sicherheitsrelevanter 3-Punkt-Zustimmtaster
Ja
Grafische Programmierung am Panel
Zugriff auf Lizenzmanagement und Updates (horstCOSMOS)
Zugriff auf Daten-Management für Backups
Zugriff auf mobiles Internet (optional)
Textuelle Roboterprogrammierung mit JavaScript
Manuelle Robotersteuerung über digitalen Zwilling
Erweiterte Sicherheitsfunktionen
Aufzeichnen von Prozessdaten
Lastabhängige Optimierung der Robotergeschwindigkeit an Wegpunkten
Max. Robotergeschwindigkeit, Genauigkeit und Leistung
Einrichten einer Arbeitsraumbegrenzung
Zugriff auf das Online-Service-System
Simulation von Roboteranwendungen auf Bedienpanel
Kommunikation mit Peripherie über TCP/IP
HORST1500

Reichweite
1485 mm
Maximale Traglast
15 kg
Wiederholgenauigkeit
±0,05 mm
Max. Geschwindigkeit (TCP)
4,6 m/s
Achsen
6
Gewicht
110 kg
Umgebungstemperatur
5 - 40 °C
Schallpegel
< 70 dB
Schutzart
IP54
Stromversorgung
230 VAC, 50-60 Hz typ. 500 W
Digitale Eingänge am Werkzeugflansch
2
Digitale Ausgänge am Werkzeugflansch
2
E/A-Stromversorgung am Werkzeugflansch
24 V / 2.5 A
Abmessungen Control (L x B x H)
446 mm x 313 mm x 174 mm
Digitale Eingänge am Schaltschrank
20
E/A-Stromversorgung am Schaltschrank
24 V / 7 A
Sicherheitsrelevante Eingänge (je 2 Kanäle)
6
Verkabelung zwischen Roboter und Steuerung
3 m
Digitale Ausgänge am Schaltschrank
18
Sicherheitsrelevante Ausgänge (je 2 Kanäle)
8
Abmessungen Panel (L x B x H)
330 mm x 255 mm x 95 mm
Spezifikation der Anzeige
13.3" Touchscreen (2560 x 1600px)
Sicherheitsrelevanter Not-Aus
Ja
Verkabelung zwischen Panel und Steuerung
5 m
Sicherheitsrelevanter 3-Punkt-Zustimmtaster
Ja
Grafische Programmierung am Panel
Zugriff auf Lizenzmanagement und Updates (horstCOSMOS)
Zugriff auf Daten-Management für Backups
Zugriff auf mobiles Internet (optional)
Textuelle Roboterprogrammierung mit JavaScript
Manuelle Robotersteuerung über digitalen Zwilling
Erweiterte Sicherheitsfunktionen
Aufzeichnen von Prozessdaten
Lastabhängige Optimierung der Robotergeschwindigkeit an Wegpunkten
Max. Robotergeschwindigkeit, Genauigkeit und Leistung
Einrichten einer Arbeitsraumbegrenzung
Zugriff auf das Online-Service-System
Simulation von Roboteranwendungen auf Bedienpanel
Kommunikation mit Peripherie über TCP/IP
Reichweite
584 mm
1141 mm
1485 mm
Maximale Traglast
3 kg
16 kg
15 kg
Wiederholgenauigkeit
±0,05 mm
±0,05 mm
±0,05 mm
Max. Geschwindigkeit (TCP)
4,4 m/s
4,6 m/s
4,6 m/s
Achsen
6
6
6
Gewicht
30 kg
105 kg
110 kg
Umgebungstemperatur
5 - 40 °C
5 - 40 °C
5 - 40 °C
Schallpegel
< 70 dB
< 70 dB
< 70 dB
Schutzart
IP54
IP54
IP54
Stromversorgung
230 VAC, 50-60 Hz typ. 250 W
230 VAC, 50-60 Hz typ. 350 W
230 VAC, 50-60 Hz typ. 500 W
Digitale Eingänge am Werkzeugflansch
2
2
2
Digitale Ausgänge am Werkzeugflansch
2
2
2
E/A-Stromversorgung am Werkzeugflansch
24 V / 2.5 A
24 V / 2.5 A
24 V / 2.5 A
Abmessungen Control (L x B x H)
446 mm x 313 mm x 174 mm
446 mm x 313 mm x 174 mm
446 mm x 313 mm x 174 mm
Digitale Eingänge am Schaltschrank
20
20
20
E/A-Stromversorgung am Schaltschrank
24 V / 7 A
24 V / 7 A
24 V / 7 A
Sicherheitsrelevante Eingänge (je 2 Kanäle)
6
6
6
Verkabelung zwischen Roboter und Steuerung
3 m
3 m
3 m
Digitale Ausgänge am Schaltschrank
18
18
18
Sicherheitsrelevante Ausgänge (je 2 Kanäle)
8
8
8
Abmessungen Panel (L x B x H)
330 mm x 255 mm x 95 mm
330 mm x 255 mm x 95 mm
330 mm x 255 mm x 95 mm
Spezifikation der Anzeige
13.3" Touchscreen (2560 x 1600px)
13.3" Touchscreen (2560 x 1600px)
13.3" Touchscreen (2560 x 1600px)
Sicherheitsrelevanter Not-Aus
Ja
Ja
Ja
Verkabelung zwischen Panel und Steuerung
5 m
5 m
5 m
Sicherheitsrelevanter 3-Punkt-Zustimmtaster
Ja
Ja
Ja
Grafische Programmierung am Panel
Zugriff auf Lizenzmanagement und Updates (horstCOSMOS)
Zugriff auf Daten-Management für Backups
Zugriff auf mobiles Internet (optional)
Textuelle Roboterprogrammierung mit JavaScript
Manuelle Robotersteuerung über digitalen Zwilling
Erweiterte Sicherheitsfunktionen
Aufzeichnen von Prozessdaten
Lastabhängige Optimierung der Robotergeschwindigkeit an Wegpunkten
Max. Robotergeschwindigkeit, Genauigkeit und Leistung
Einrichten einer Arbeitsraumbegrenzung
Zugriff auf das Online-Service-System
Simulation von Roboteranwendungen auf Bedienpanel
Kommunikation mit Peripherie über TCP/IP
Advanced Graphical Features
Grafische Programmierung von Palletieranwendungen

Das feature Grafische Programmierung von Palletieranwendungen ist im Pakte enthalten
Grafische Programmierung komplexer Bahnen

Das feature Grafische Programmierung komplexer Bahnen ist im Pakte enthalten
Ausführen von Makro-Funktionen

Das feature Ausführen von Makro-Funktionen ist im Pakte enthalten
Benutzerdefinierte Koordinatensysteme

Das feature Benutzerdefinierte Koordinatensysteme ist im Pakte enthalten
Zugriff auf die Schnittstelle Profinet

Das feature Zugriff auf die Schnittstelle Profinet ist nicht in enthalten
Zugriff auf die Schnittstelle Modbus

Das feature Zugriff auf die Schnittstelle Modbus ist nicht in enthalten
Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC)

Das feature Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC) ist nicht in enthalten
AI Copilot

Das feature AI Copilot ist nicht in enthalten
AI Programming
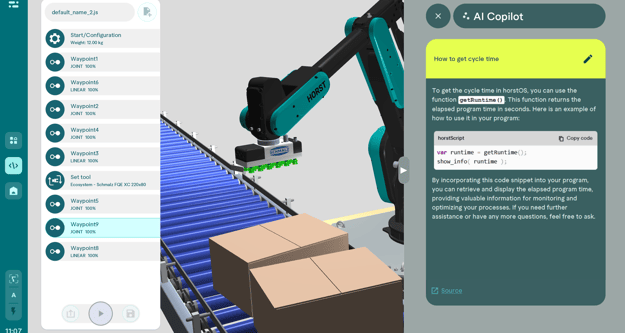
Das feature AI Programming ist nicht in enthalten
AI Error Handling
Das feature AI Error Handling ist nicht in enthalten
Component Management

Das feature Component Management ist nicht in enthalten
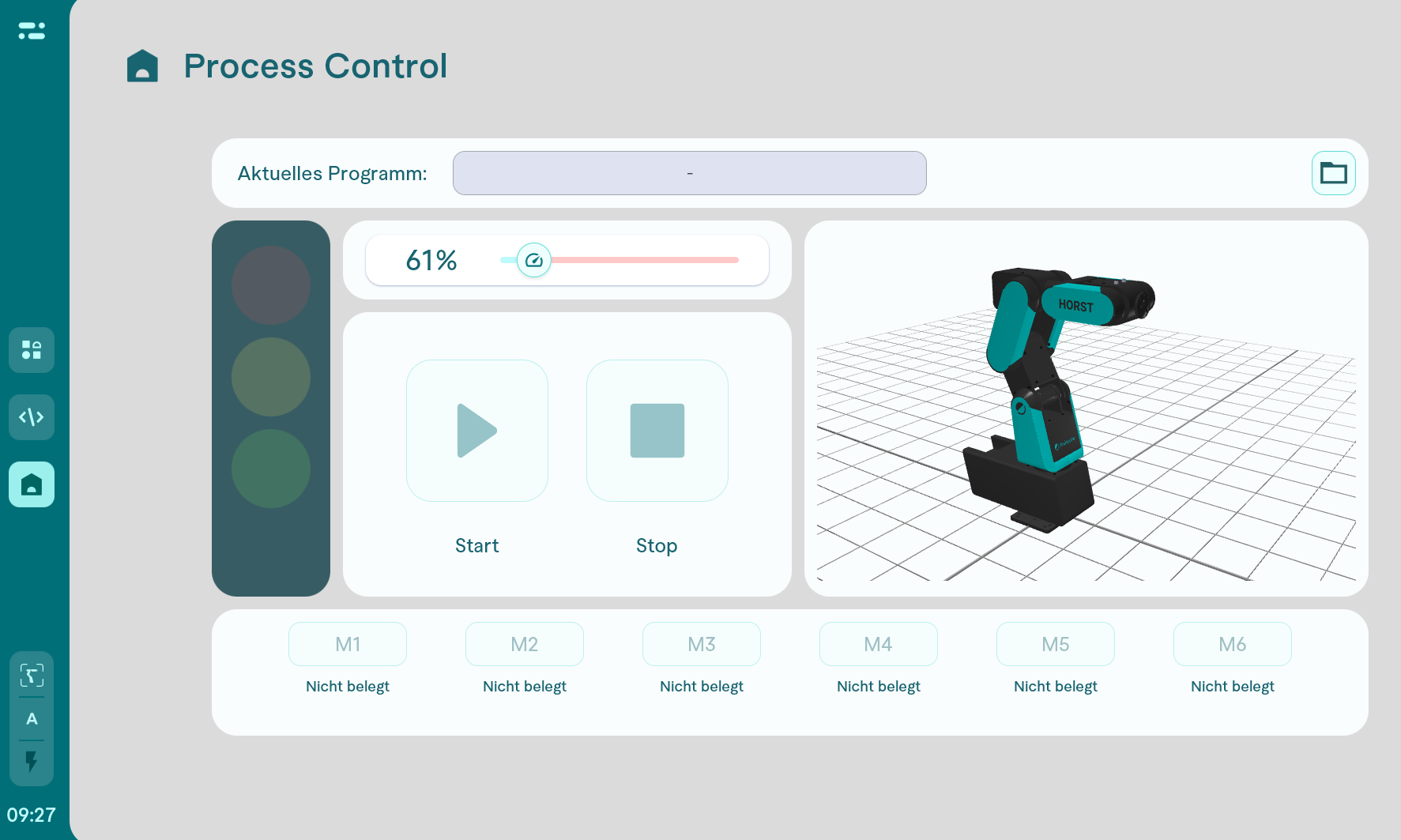
Process Control

Das feature Process Control ist nicht in enthalten
Advanced Interfaces

Grafische Programmierung von Palletieranwendungen
Das feature Grafische Programmierung von Palletieranwendungen ist nicht in enthalten
Grafische Programmierung komplexer Bahnen
Das feature Grafische Programmierung komplexer Bahnen ist nicht in enthalten
Ausführen von Makro-Funktionen
Das feature Ausführen von Makro-Funktionen ist nicht in enthalten
Benutzerdefinierte Koordinatensysteme
Das feature Benutzerdefinierte Koordinatensysteme ist nicht in enthalten
Zugriff auf die Schnittstelle Profinet
Das feature Zugriff auf die Schnittstelle Profinet ist im Pakte enthalten
Zugriff auf die Schnittstelle Modbus
Das feature Zugriff auf die Schnittstelle Modbus ist im Pakte enthalten
Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC)
Das feature Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC) ist im Pakte enthalten
AI Copilot
Das feature AI Copilot ist nicht in enthalten
AI Programming
Das feature AI Programming ist nicht in enthalten
AI Error Handling
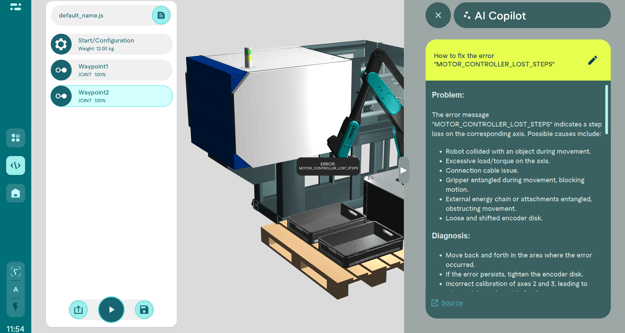
Das feature AI Error Handling ist nicht in enthalten
Component Management
Das feature Component Management ist nicht in enthalten
Process Control
Das feature Process Control ist nicht in enthalten
AI Features

Grafische Programmierung von Palletieranwendungen
Das feature Grafische Programmierung von Palletieranwendungen ist nicht in enthalten
Grafische Programmierung komplexer Bahnen
Das feature Grafische Programmierung komplexer Bahnen ist nicht in enthalten
Ausführen von Makro-Funktionen
Das feature Ausführen von Makro-Funktionen ist nicht in enthalten
Benutzerdefinierte Koordinatensysteme
Das feature Benutzerdefinierte Koordinatensysteme ist nicht in enthalten
Zugriff auf die Schnittstelle Profinet
Das feature Zugriff auf die Schnittstelle Profinet ist nicht in enthalten
Zugriff auf die Schnittstelle Modbus
Das feature Zugriff auf die Schnittstelle Modbus ist nicht in enthalten
Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC)
Das feature Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC) ist nicht in enthalten
AI Copilot
Das feature AI Copilot ist im Pakte enthalten
AI Programming
Das feature AI Programming ist im Pakte enthalten
AI Error Handling
Das feature AI Error Handling ist im Pakte enthalten
Component Management
Das feature Component Management ist nicht in enthalten
Process Control
Das feature Process Control ist nicht in enthalten
Advanced Automation Features
Grafische Programmierung von Palletieranwendungen
Das feature Grafische Programmierung von Palletieranwendungen ist nicht in enthalten
Grafische Programmierung komplexer Bahnen
Das feature Grafische Programmierung komplexer Bahnen ist nicht in enthalten
Ausführen von Makro-Funktionen
Das feature Ausführen von Makro-Funktionen ist nicht in enthalten
Benutzerdefinierte Koordinatensysteme
Das feature Benutzerdefinierte Koordinatensysteme ist nicht in enthalten
Zugriff auf die Schnittstelle Profinet
Das feature Zugriff auf die Schnittstelle Profinet ist nicht in enthalten
Zugriff auf die Schnittstelle Modbus
Das feature Zugriff auf die Schnittstelle Modbus ist nicht in enthalten
Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC)
Das feature Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC) ist nicht in enthalten
AI Copilot
Das feature AI Copilot ist nicht in enthalten
AI Programming
Das feature AI Programming ist nicht in enthalten
AI Error Handling
Das feature AI Error Handling ist nicht in enthalten
Component Management
Das feature Component Management ist im Pakte enthalten
Process Control
Das feature Process Control ist im Pakte enthalten
Grafische Programmierung von Palletieranwendungen
Das feature Grafische Programmierung von Palletieranwendungen ist im Pakte enthalten
Das feature Grafische Programmierung von Palletieranwendungen ist nicht in enthalten
Das feature Grafische Programmierung von Palletieranwendungen ist nicht in enthalten
Das feature Grafische Programmierung von Palletieranwendungen ist nicht in enthalten
Grafische Programmierung komplexer Bahnen
Das feature Grafische Programmierung komplexer Bahnen ist im Pakte enthalten
Das feature Grafische Programmierung komplexer Bahnen ist nicht in enthalten
Das feature Grafische Programmierung komplexer Bahnen ist nicht in enthalten
Das feature Grafische Programmierung komplexer Bahnen ist nicht in enthalten
Ausführen von Makro-Funktionen
Das feature Ausführen von Makro-Funktionen ist im Pakte enthalten
Das feature Ausführen von Makro-Funktionen ist nicht in enthalten
Das feature Ausführen von Makro-Funktionen ist nicht in enthalten
Das feature Ausführen von Makro-Funktionen ist nicht in enthalten
Benutzerdefinierte Koordinatensysteme
Das feature Benutzerdefinierte Koordinatensysteme ist im Pakte enthalten
Das feature Benutzerdefinierte Koordinatensysteme ist nicht in enthalten
Das feature Benutzerdefinierte Koordinatensysteme ist nicht in enthalten
Das feature Benutzerdefinierte Koordinatensysteme ist nicht in enthalten
Zugriff auf die Schnittstelle Profinet
Das feature Zugriff auf die Schnittstelle Profinet ist nicht in enthalten
Das feature Zugriff auf die Schnittstelle Profinet ist im Pakte enthalten
Das feature Zugriff auf die Schnittstelle Profinet ist nicht in enthalten
Das feature Zugriff auf die Schnittstelle Profinet ist nicht in enthalten
Zugriff auf die Schnittstelle Modbus
Das feature Zugriff auf die Schnittstelle Modbus ist nicht in enthalten
Das feature Zugriff auf die Schnittstelle Modbus ist im Pakte enthalten
Das feature Zugriff auf die Schnittstelle Modbus ist nicht in enthalten
Das feature Zugriff auf die Schnittstelle Modbus ist nicht in enthalten
Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC)
Das feature Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC) ist nicht in enthalten
Das feature Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC) ist im Pakte enthalten
Das feature Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC) ist nicht in enthalten
Das feature Primäre Schnittstelle für externe Funktionsaufrufe (via XML-RPC) ist nicht in enthalten
AI Copilot
Das feature AI Copilot ist nicht in enthalten
Das feature AI Copilot ist nicht in enthalten
Das feature AI Copilot ist im Pakte enthalten
Das feature AI Copilot ist nicht in enthalten
AI Programming
Das feature AI Programming ist nicht in enthalten
Das feature AI Programming ist nicht in enthalten
Das feature AI Programming ist im Pakte enthalten
Das feature AI Programming ist nicht in enthalten
AI Error Handling
Das feature AI Error Handling ist nicht in enthalten
Das feature AI Error Handling ist nicht in enthalten
Das feature AI Error Handling ist im Pakte enthalten
Das feature AI Error Handling ist nicht in enthalten
Component Management
Das feature Component Management ist nicht in enthalten
Das feature Component Management ist nicht in enthalten
Das feature Component Management ist nicht in enthalten
Das feature Component Management ist im Pakte enthalten
Process Control
Das feature Process Control ist nicht in enthalten
Das feature Process Control ist nicht in enthalten
Das feature Process Control ist nicht in enthalten
Das feature Process Control ist im Pakte enthalten
Software Updates
Zugriff auf die aktuellen Software-Releases
Das feature Zugriff auf die aktuellen Software-Releases ist im Pakte enthalten
Service-Hotline
Das feature Service-Hotline ist nicht in enthalten
Technische Beratung durch Roboterexperten
Das feature Technische Beratung durch Roboterexperten ist nicht in enthalten
Verschleißteilegarantie
Das feature Verschleißteilegarantie ist nicht in enthalten
Systemprüfung (Remote oder vor Ort)
Das feature Systemprüfung (Remote oder vor Ort) ist nicht in enthalten
Erweiterte Garantie für gesamtes Robotersystem
Das feature Erweiterte Garantie für gesamtes Robotersystem ist nicht in enthalten
Ersatzteilflatrate und -lieferung
Das feature Ersatzteilflatrate und -lieferung ist nicht in enthalten
Care

Zugriff auf die aktuellen Software-Releases
Das feature Zugriff auf die aktuellen Software-Releases ist im Pakte enthalten
Service-Hotline
Das feature Service-Hotline ist im Pakte enthalten
Technische Beratung durch Roboterexperten
Das feature Technische Beratung durch Roboterexperten ist im Pakte enthalten
Verschleißteilegarantie
Das feature Verschleißteilegarantie ist im Pakte enthalten
Systemprüfung (Remote oder vor Ort)
Das feature Systemprüfung (Remote oder vor Ort) ist im Pakte enthalten
Erweiterte Garantie für gesamtes Robotersystem
Das feature Erweiterte Garantie für gesamtes Robotersystem ist nicht in enthalten
Ersatzteilflatrate und -lieferung
Das feature Ersatzteilflatrate und -lieferung ist nicht in enthalten
Care Plus

Zugriff auf die aktuellen Software-Releases
Das feature Zugriff auf die aktuellen Software-Releases ist im Pakte enthalten
Service-Hotline
Das feature Service-Hotline ist im Pakte enthalten
Technische Beratung durch Roboterexperten
Das feature Technische Beratung durch Roboterexperten ist im Pakte enthalten
Verschleißteilegarantie
Das feature Verschleißteilegarantie ist im Pakte enthalten
Systemprüfung (Remote oder vor Ort)
Das feature Systemprüfung (Remote oder vor Ort) ist im Pakte enthalten
Erweiterte Garantie für gesamtes Robotersystem
Das feature Erweiterte Garantie für gesamtes Robotersystem ist im Pakte enthalten
Ersatzteilflatrate und -lieferung
Das feature Ersatzteilflatrate und -lieferung ist im Pakte enthalten
Academy Plus

horstOS Simulation