Markus Esser
Markus Esser
Lesen Sie in diesen Release Notes zum Update 2022.04 für horstFX, wie globale grafische Funktionen und weitere Features Ihr Nutzererlebnis für unsere Roboter-Software verbessern.
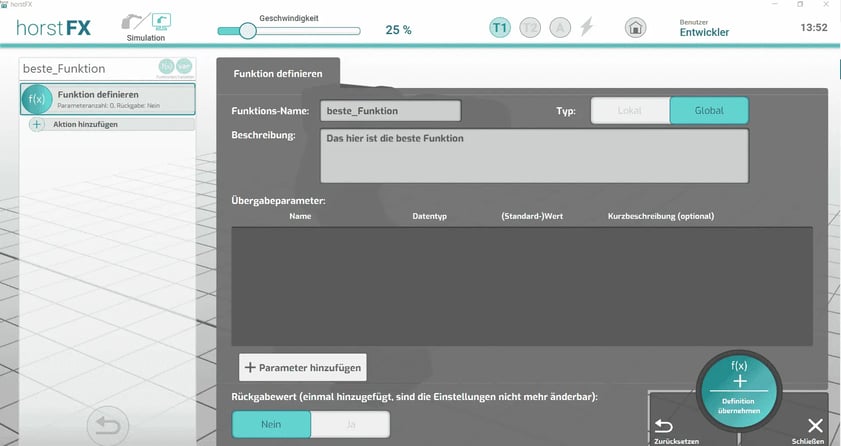
Globale grafische Funktionen
Ab sofort ist es möglich, einmal programmierte Funktionen nicht nur im Ursprungs-Programm sondern auch in anderen Anwendungsprogrammen innerhalb von horstFX zu nutzen. Die programmierten grafischen Funktionen können als "global" definiert werden und in allen anderen Anwendungsprogrammen einfach genutzt werden.
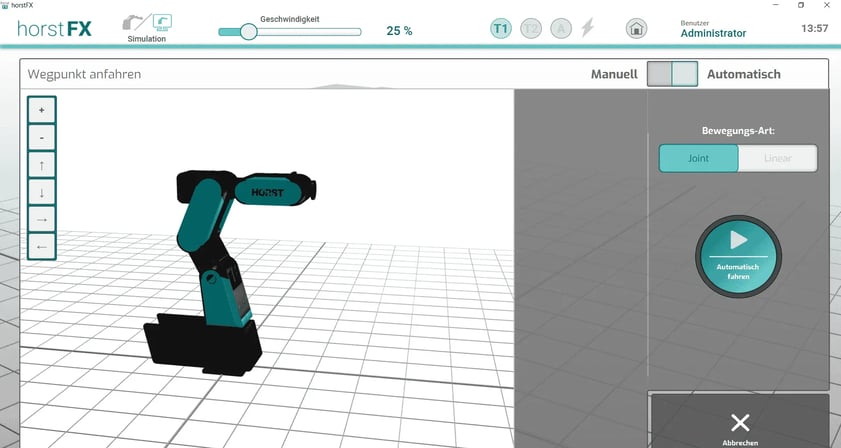
Beliebig schnelles Anfahren von Wegpunkten in der Bearbeitung
In den Menüs "Wegpunkt anfahren" und "Bestimmte Pose anfahren" ist es nun möglich über den Geschwindigkeitsregler die Geschwindigkeit der Bewegung manuell anzupassen. So kann die Ziel-Pose beliebig schnell angefahren werden.
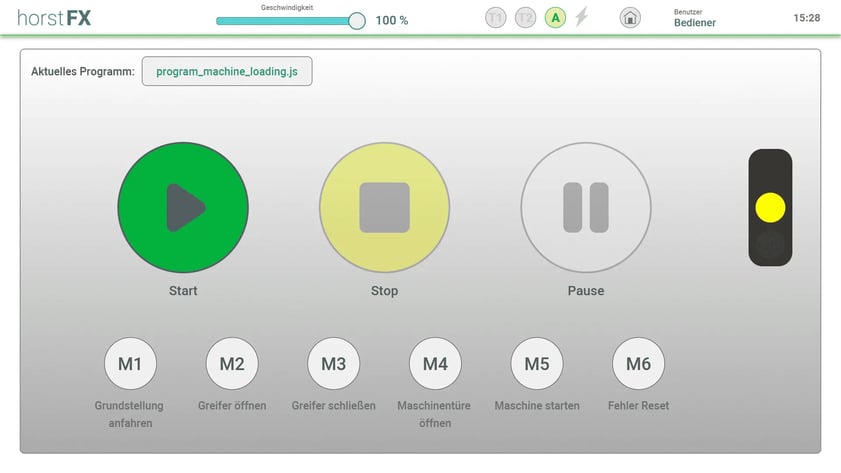
Nutzerspezifische Bedienansicht
Um die Bedienung von HORST noch einfacher zu machen, gibt es nun die Möglichkeit der nutzerspezifischen Bedienansicht, die einen speziellen Abspiel-Modus öffnet. In diesem Modus ist es lediglich möglich das Programm zu starten, zu stoppen und Fehler zu quittieren. Eine Status-Ampel gibt Auskunft darüber, ob das Programm aktiv ist oder ob ein Eingreifen erforderlich ist. So lässt sich die Gesamtanwendung einfach, intuitiv und übersichtlich steuern, indem die Bedienansicht auf unnötige Informationen verzichtet, die für die Nutzung nicht relevant sind.
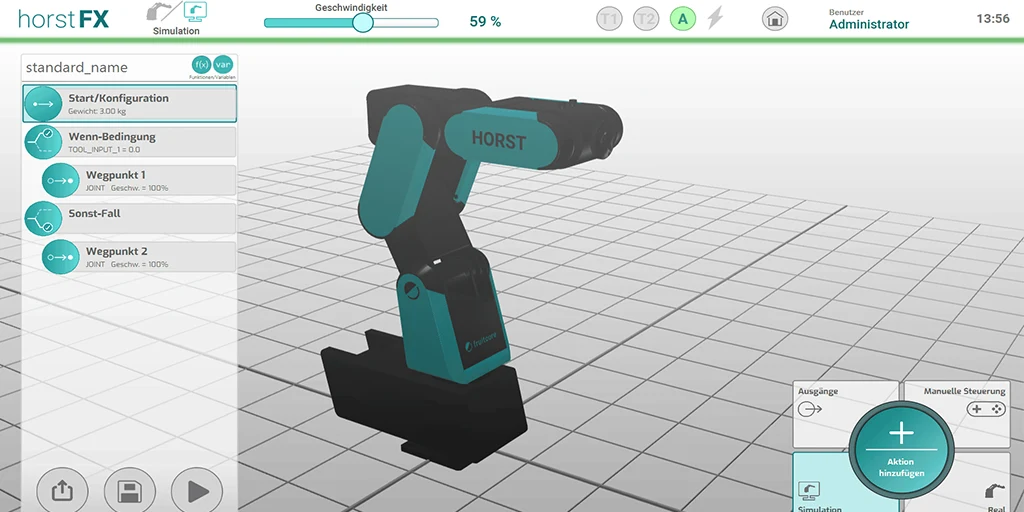
Sonst-Fall
Um noch schneller und einfacher programmieren zu können, kann ab sofort in grafischen Programmen die Aktion "Wenn-Bedingung" direkt beim Erstellen um einen „Sonst-Fall“ erweitert werden. Dies hat eine geringere Fehleranfälligkeit bei der Programmierung zur Folge, da im grafischen Menü ganz einfach alle Programmierschritte nacheinander durchlaufen werden können.
-1.webp?width=841&height=448&name=Wenn-Bedingungen%20(1)-1.webp)
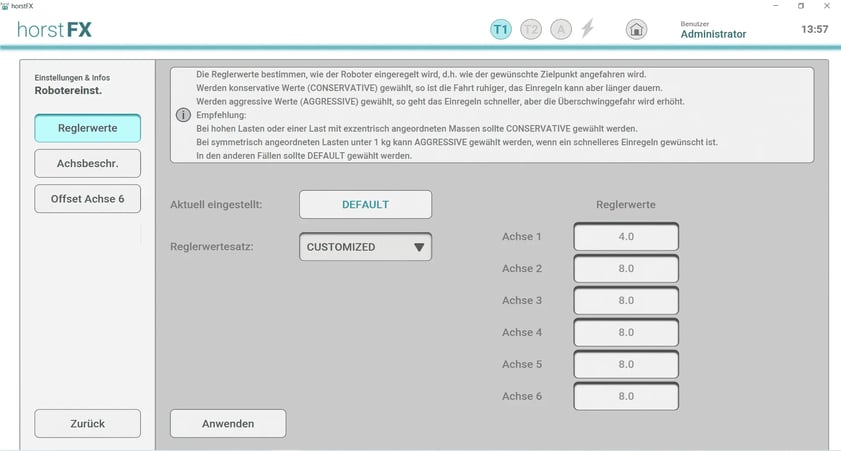
Frei definierbare Reglerwerte
Wir haben die Auswahl der drei vordefinierten Einstellmöglichkeiten für Reglerwerte um eine frei definierbare Einstellung erweitert. Die Reglerwerte der einzelnen Achsen können nun innerhalb ihres gültigen Bereichs frei definiert werden. Sie bestimmen, wie der Roboter eingeregelt wird, d.h. wie schnell der gewünschte Zielpunkt angefahren wird. Die freie Einstellbarkeit dieser Werte ermöglicht es, die Bewegungen in Prozessen mit speziellen Lastfällen zu optimieren (z.B. bei stark exzentrischen Lasten am Roboterflansch). So werden auch spezielle Anwendungen abgedeckt, die eine individuellere Regelwerte benötigen. Die individuelle Einstellung ermöglicht außerdem eine zusätzliche Optimierung des Programmablaufs.