 Benjamin Kreuz
Benjamin Kreuz
Immer mehr Industriebetriebe wollen ihre Produktion automatisieren. Durch eine neuartige Kinematik lassen sich die Kosten für Industrieroboter reduzieren. Eine der größten Hürden zum Einstieg in die Automatisierung wird damit aus dem Weg geräumt. Moderne Roboter können auch ohne verkomplizierte und hochpreisige Mechanik auskommen.
Getriebetechnik als Kostentreiber für Industrieroboter
Durch das steigende Interesse an Automatisierung wächst der Bedarf an Industrierobotern, die sich schnell einsetzen und einfach bedienen lassen. Einige Hersteller sorgen mit der Weiterentwicklung ihrer Roboter für alternative Antriebsmöglichkeiten. Dank derer müssen sich Unternehmen für erste erfolgreiche Automatisierungs-Projekte nicht erst zeitliche und personelle Ressourcen freiräumen.
Auch bei aller heute realisierbaren Einfachheit und Benutzerfreundlichkeit bleiben Industrieroboter hochkomplexe Systeme mit leistungsstarker Antriebstechnologie. Ohne eine gewisse Investition sind Qualitätsprodukte nicht zu bekommen – "billig" bedeutet auch in der Robotik selten "günstig".
Einer der Hauptkostentreiber von Robotern ist die Getriebetechnik. Manche Anbieter setzen auf Sondergetriebe mit speziellen Verzahnungstechniken. Doch auch die beiden herkömmlichen Antriebskonzepte mit Wellgetrieben, die häufig in Cobots genutzt werden, oder Zykloidgetrieben sind kostspielig. Auf der anderen Seite sind sie nahezu spielfrei, ein wichtiger Faktor in der Robotik. Durch die Entwicklung neuerer Robotergenerationen lassen sich hervorragende Performances auch zu einem besseren Preis-Leistungs-Verhältnis erzielen.
Wie können Roboter ohne teure Antriebsformen auskommen?
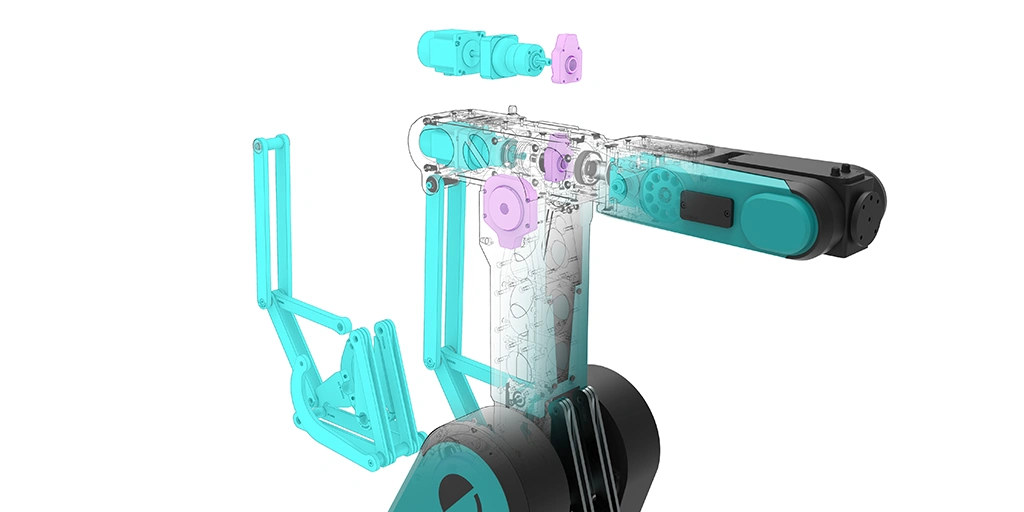
So werden beispielsweise Digital Robots von fruitcore robotics an den beiden Hauptachsen über Koppelgetriebe und Planetengetriebe bewegt. Es ist insbesondere die patentierte Anordnung des Koppelgetriebes, durch die Traglasten, Reichweiten und Dynamiken erzielt werden können wie sonst nur mit Well- oder Zykloidgetrieben. Auch hohe Lasten von bis zu zehn Kilogramm und eine maximale Reichweite von knapp 1,50 Metern sind so möglich. Dies jedoch ohne die hohen Anschaffungs- und Betriebskosten von Well- oder Zykloidgetrieben.
Die Glieder des Koppelgetriebes sind so angeordnet, dass sie immer dann viel Kraft übertragen, wenn die Position des Roboters dies erforderlich macht. Entsprechend ist das Übersetzungsverhältnis niedriger, wenn weniger Kraft benötigt wird.
Wie funktionieren Übersetzung und Kraftübertragung bei Robotern mit Koppelgetriebe?
Der wesentliche Unterschied einer positionsabhängigen, nicht-linearen Antriebsform wird beim Vergleich zum linearen Zahnradgetriebe deutlich: Die Kurbel des Koppelgetriebes entspricht dem kleinen Zahnrad und die Schwinge dem großen. Bei einer gleichförmigen Drehung der Kurbel dreht sich die Schwinge non-linear, also an manchen Stellen schneller als an anderen.
Das wiederum beeinflusst analog die Übertragung der Kraft:
- schnelle Bewegung der Schwinge = kleine Übersetzung = geringere Kraftübertragung
- langsame Bewegung der Schwinge = große Übersetzung = höhere Kraftübertragung
Bei einem ausgestreckten Roboterarm liegt mit diesem Antrieb das Drehmoment bei der Beschleunigung unter Last damit deutlich unter dem von herkömmlichen Robotern. Folglich kommen die Alternativantriebe auch mit kleineren, leichteren Motoren aus, was wiederum den Preis attraktiv hält.
Durch die neuartige Kinematik lässt sich ein Teil der wirkenden Kräfte über die Stäbe auf die Struktur ableiten. Aus der Gebäudekonstruktion ist dieser Effekt aus dem Fachwerk bekannt. In Summe muss hierdurch weniger Masse bewegt werden. Außerdem ist es möglich, den Motor für die dritte Achse in der Roboterbasis zu platzieren – dieses Gewicht muss also nicht mitbewegt werden. Insgesamt lässt sich die Antriebsleistung somit wesentlich besser ausreizen als bei einem Industrieroboter mit serieller Kinematik.
Wie kann ein zu hohes Spiel vermieden werden?
Die Digital Robots von fruitcore robotics unterscheiden sich bereits auf den ersten Blick von herkömmlichen Industrierobotern durch das Zusammenspiel aus Koppel- und den ergänzenden Planetengetrieben an einigen Achsen.

So verstärkt sich der Effekt des nicht-linearen Antriebs, die Übersetzungsverhältnisse vervielfachen sich. Auch bei hohen Geschwindigkeiten des Roboters lassen sich dadurch optimale Traglasten und Reichweiten erzielen. Die Kombination mit Koppelgetrieben erlaubt es, dass bei den Planetengetrieben auf eine zweite Getriebestufe verzichtet werden kann. Sie würde ein für Knickarmroboter ungewünscht hohes Spiel verursachen.
So aber lässt sich auf die zwar annähernd spielfreien, dafür aber hochpreisigen Well- oder Zykloidgetriebe verzichten. Schließlich sind Planetengetriebe dank ihrer mechanischen Bauart und der großen Verbreitung in anderen Branchen (z.B. im Automobil- und Fahrradbereich) wesentlich günstiger.
Wie unterscheidet sich die Lebensdauer zu der von Wellgetrieben?
Besonders effizient und positionsgenau auch bei hohen Geschwindigkeiten operieren können Roboter bei einer Platzierung des Encoders (auch Winkelgeber bezeichnet) hinter dem Getriebe, statt davor. Bei allen Vorteilen hinsichtlich Spielfreiheit der Well- und Zykloidgetriebe sollte zudem nicht ihr im Vergleich zu Planetengetrieben höherer Verschleiß außer Acht gelassen werden: Je nach Nutzung haben letztgenannte eine fünf- bis siebenmal höhere Lebensdauer.
Fazit: Auch ohne Well- oder Zykloidgetriebe lassen sich Leistungen wie mit einem herkömmlichen 6-Achs-Roboter erzielen. Durch die zuvor nicht genutzte Kombination aus Koppelgetrieben, Planetengetrieben und hochauflösenden Encodern verfügen Digital Robots wie HORST nicht nur über ein starkes Preis-Leistungs-Verhältnis. Sie können auch mit hohen Traglasten, Reichweiten und Geschwindigkeiten operieren. Sie ist anderen Industrierobotern mit mehreren Achsen ebenso bei der Größe und Erreichbarkeit des Arbeitsbereichs ebenbürtig.